最近看了ICML 2020上的一个分享(末尾有链接),主题就是Model-based RL,对MBRL的归纳总结非常全面,建议一看。
刚好最近在考虑model planning的问题,因此把这个分享里的planning部分单独拿出来简要介绍一下。
先把整体的methods tree放出来,便于对planning体系的理解:
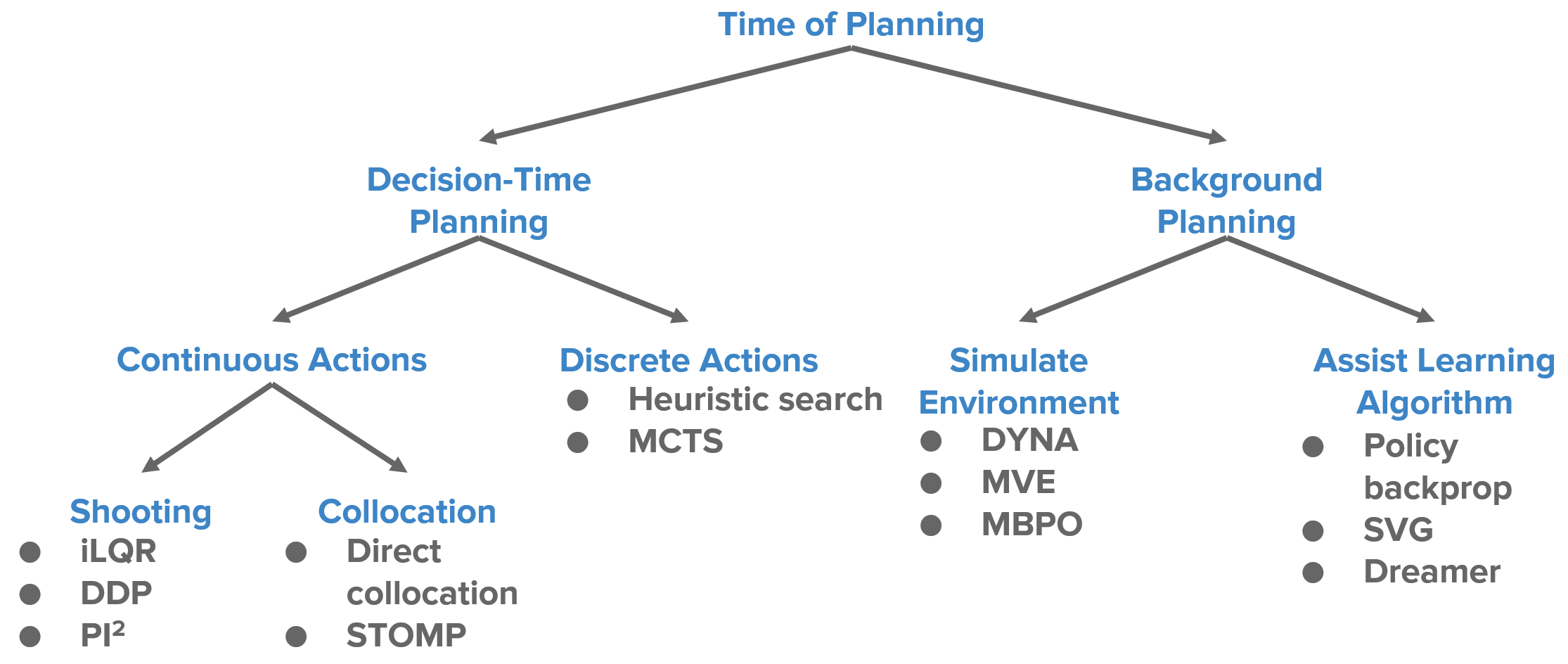
1. Background Planning 与 Decision-time Planning
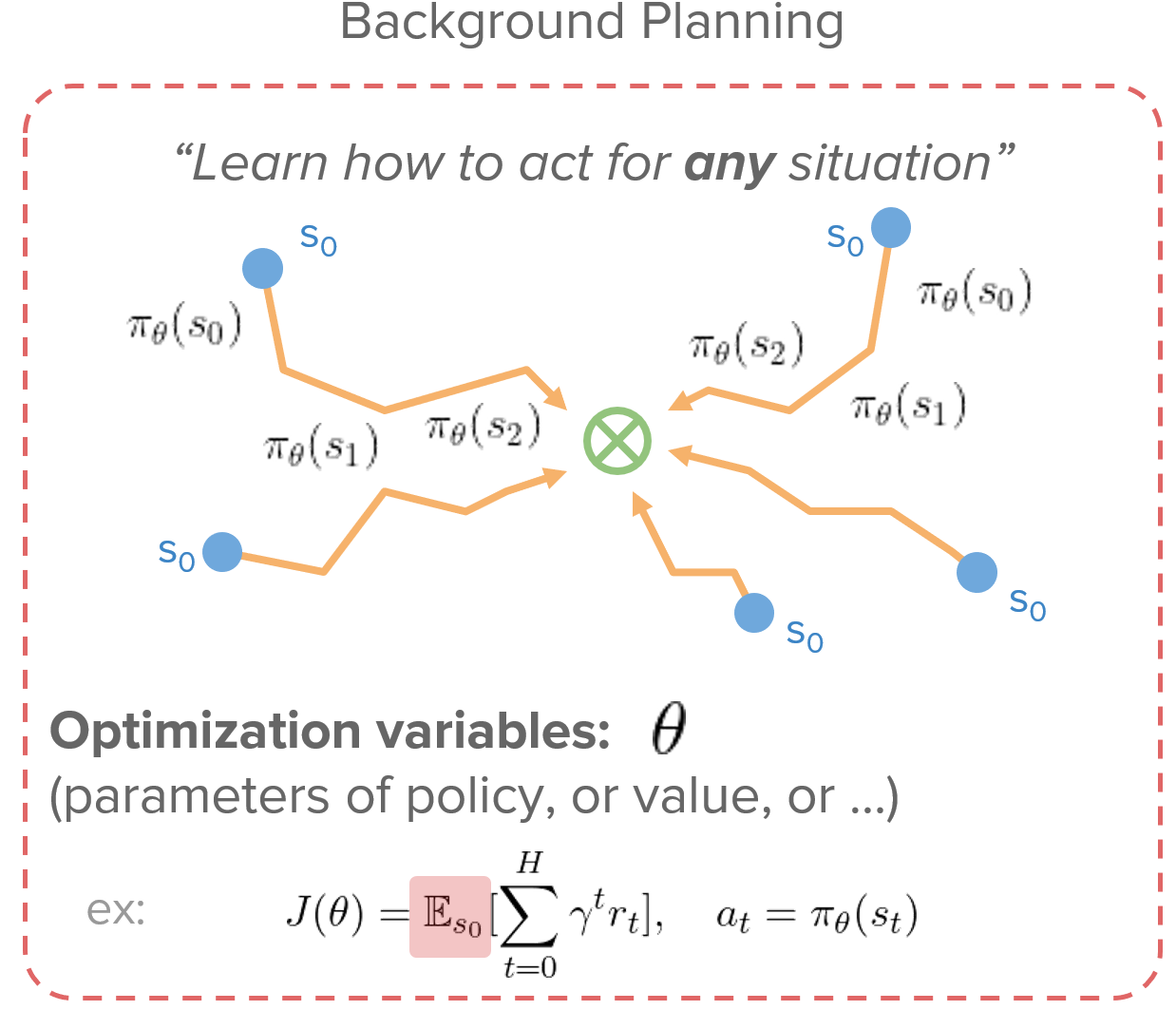
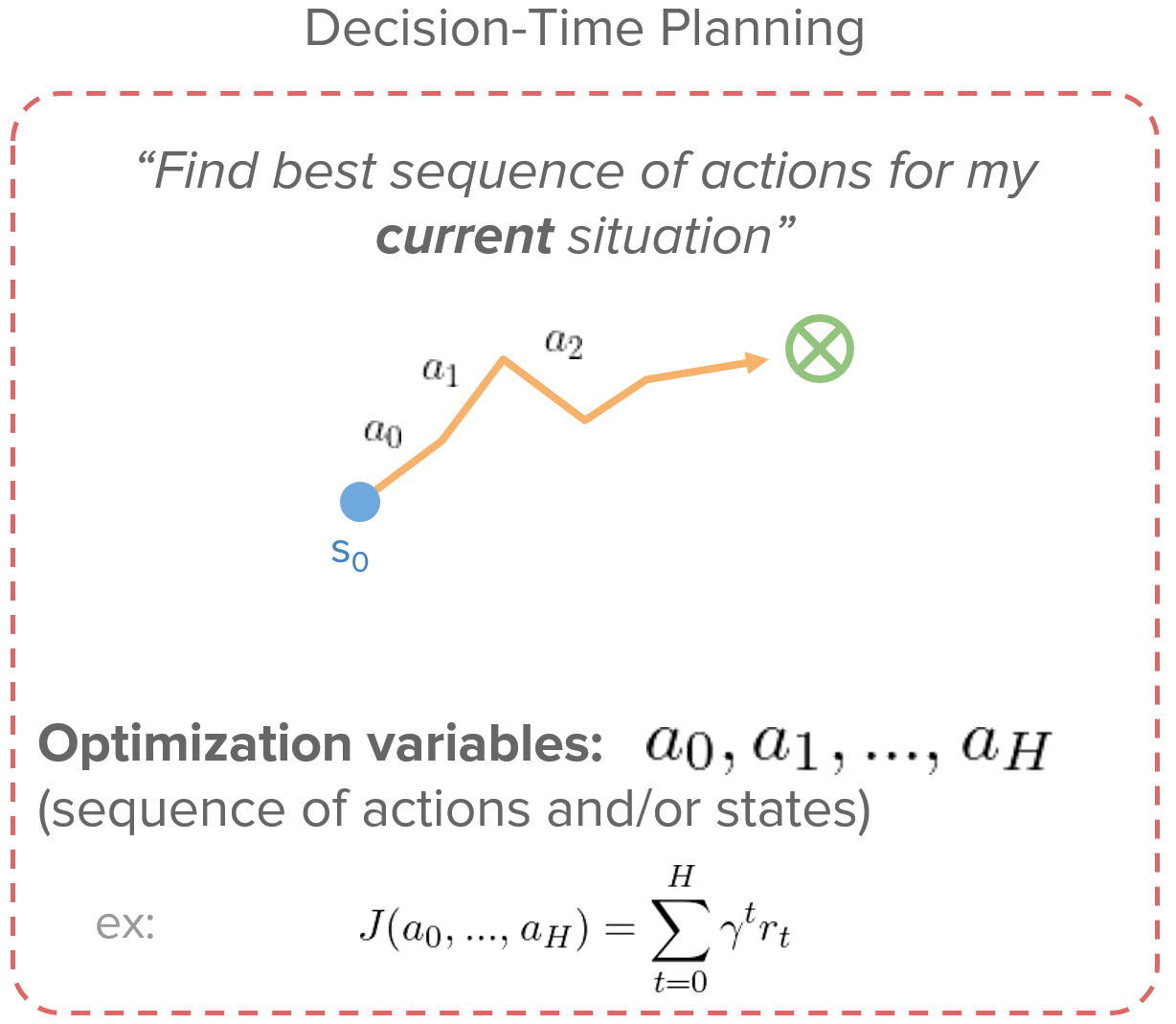
Planning可以分为background planning和decision-time planning,前者基于一个初始状态和当前策略来与你的model交互,不断生成next state和next action()来实现rollout,而后者则不考虑策略,而是基于action序列持续与model交互()来实现rollout。
关于两者的区别,由于background planning的return为
可以看出,background planning能够通过求期望来更全面地考虑不同初始状态,所以其特点是**『学习在任意情况下如何更好地表现』**,通用性更好
而decision-time planning的return为,能够更快速地对当前状态做rollout,因此其特点为**『专注学习当前状态下如何更好地表现』**
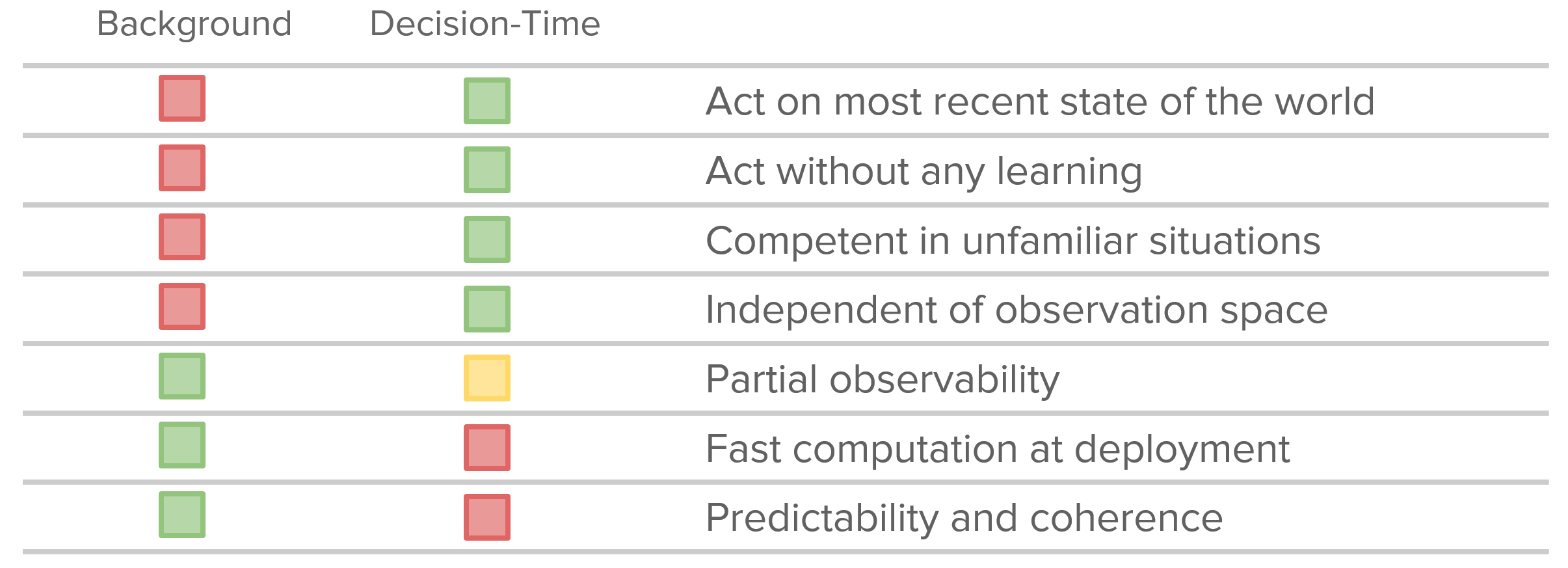
两者各有优缺点,下表做了一个简单的总结:
2. Background Planning
Background planning主要有模拟环境和辅助learning的用法:
2.1 Simulating the environment
最简单直接使用model的方法,将真实环境数据和模型生成数据混合,然后执行model-free方法(可以看作是一种Data Augmentation)
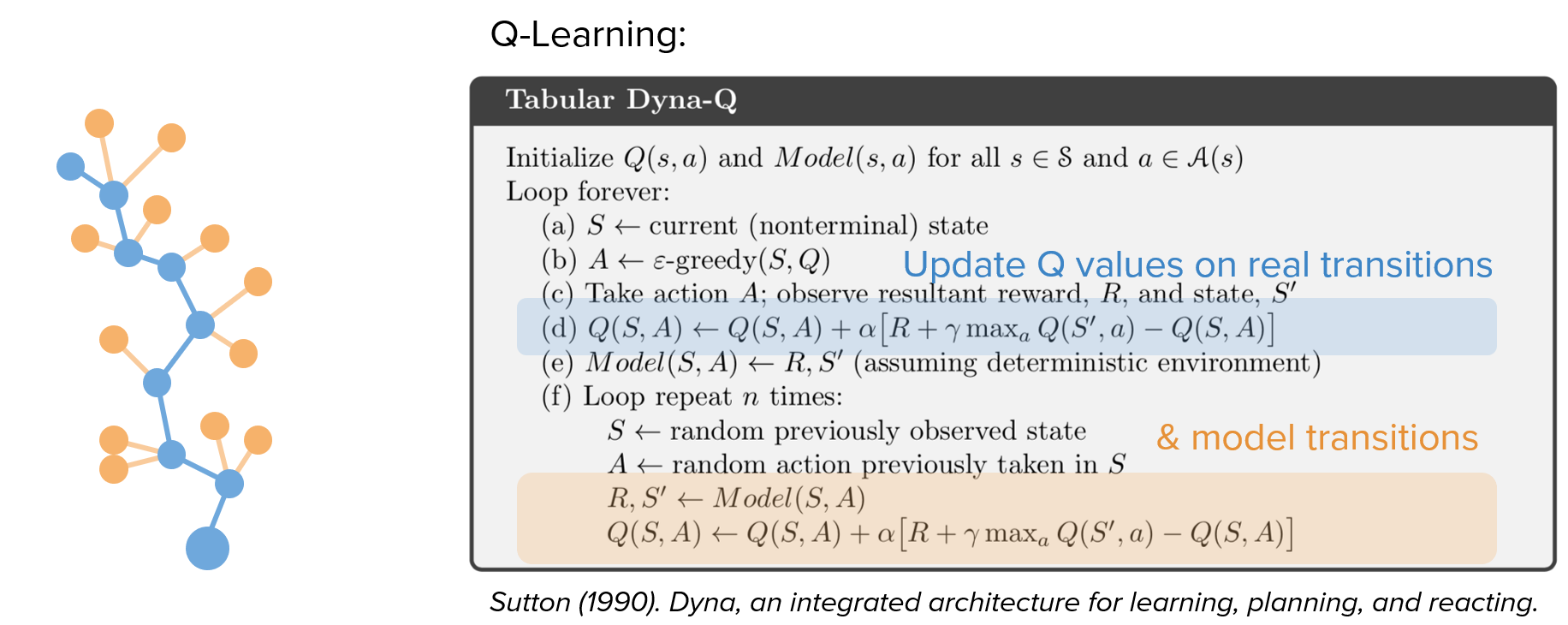
2.2 Assisting the learning algorithm
策略梯度法中,在计算梯度时,transition model 和 reward model 确保我们能够使用链式法则来计算梯度
3. Decision-Time Planning
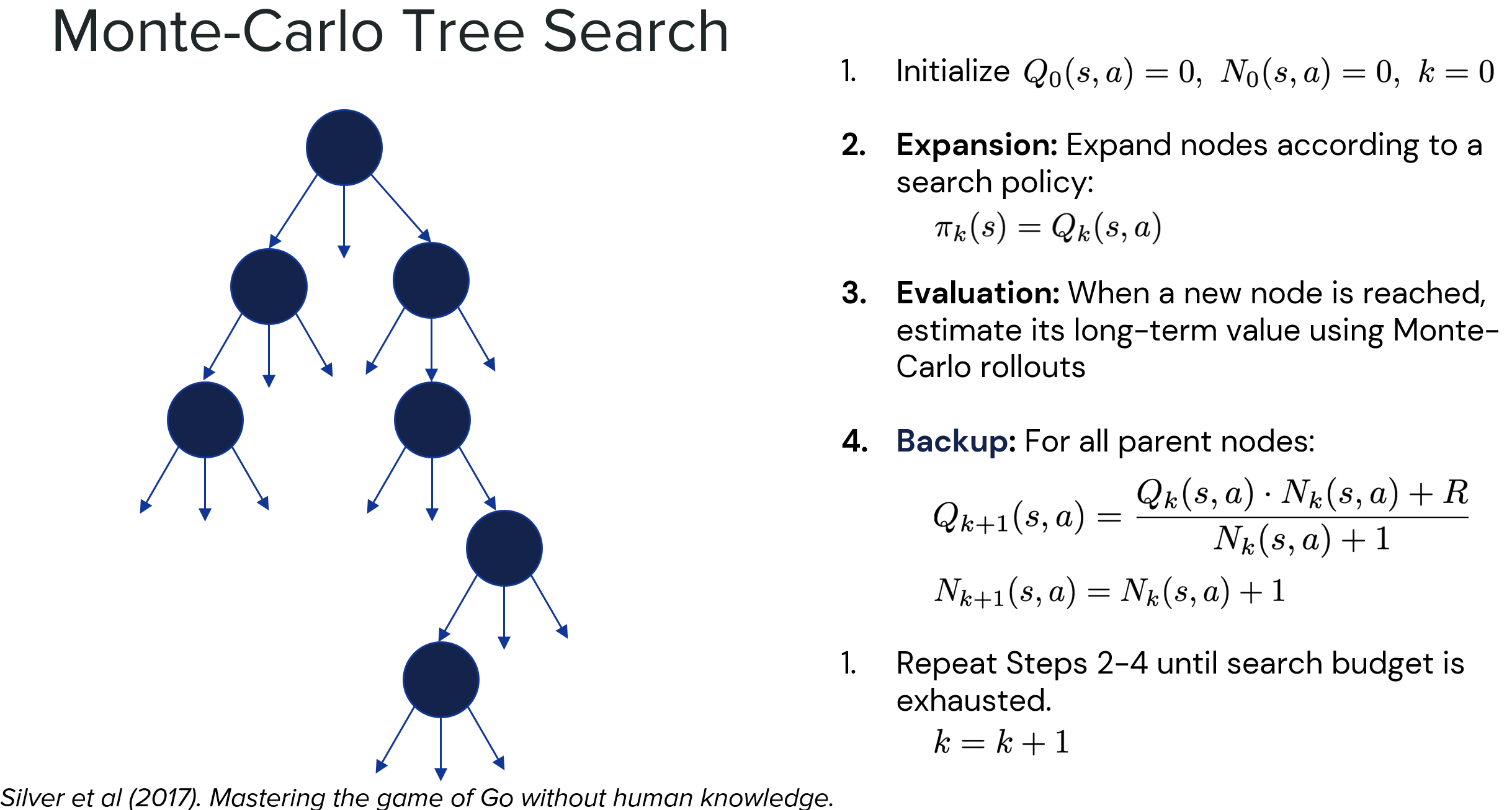
Decision-time planning分为离散型和连续型两种场景,前者的代表便是大名鼎鼎的蒙特卡洛树搜索(MCTS),后者则包含能够解决不同场景问题的具体方法。
3.1 Discrete
代表算法:蒙特卡洛树搜索(关于MCTS的一些简要介绍,可以看博客里的另一篇文章:蒙特卡罗树搜索(MCTS) - 介绍)
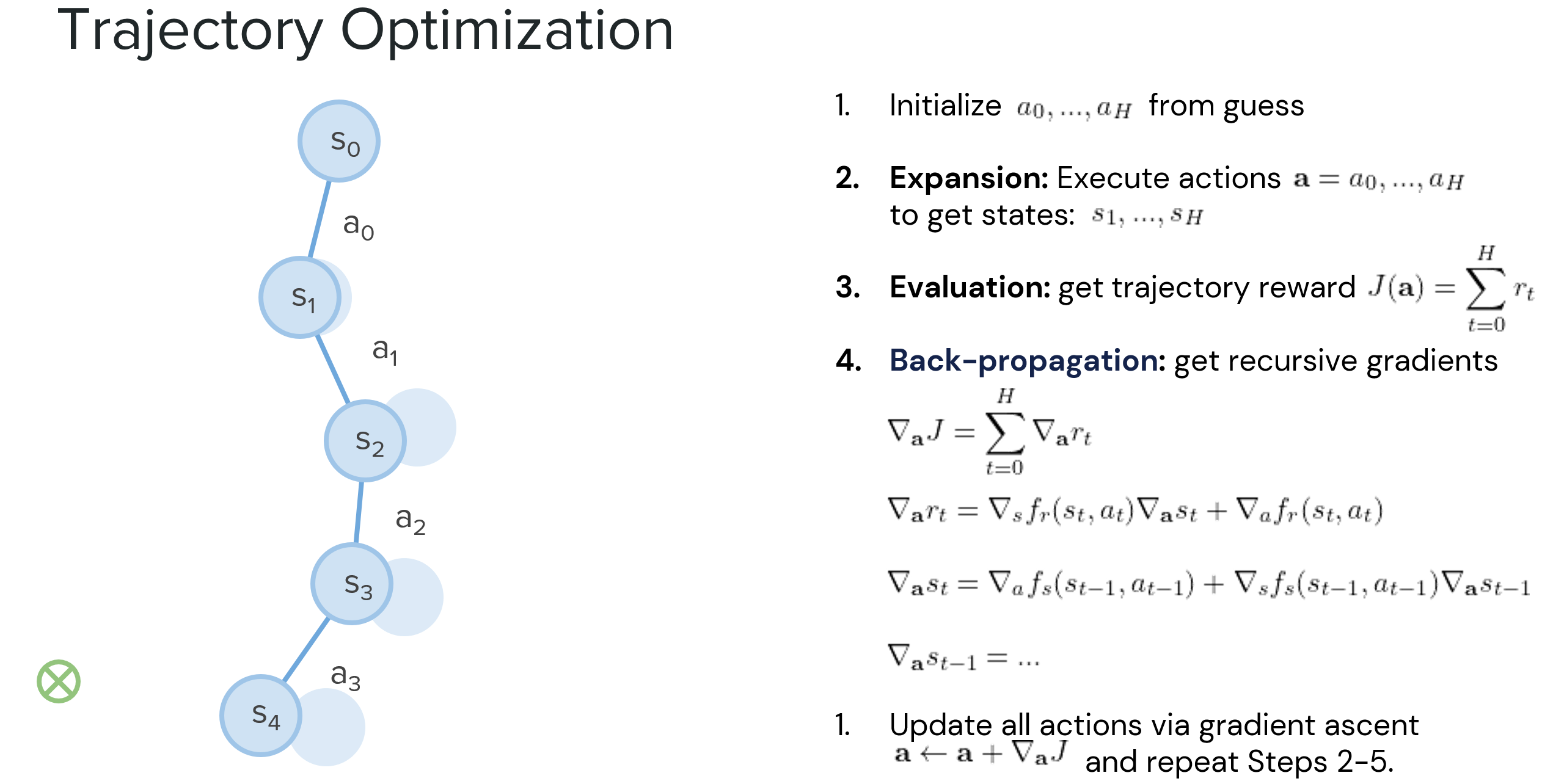
3.2 Continuous
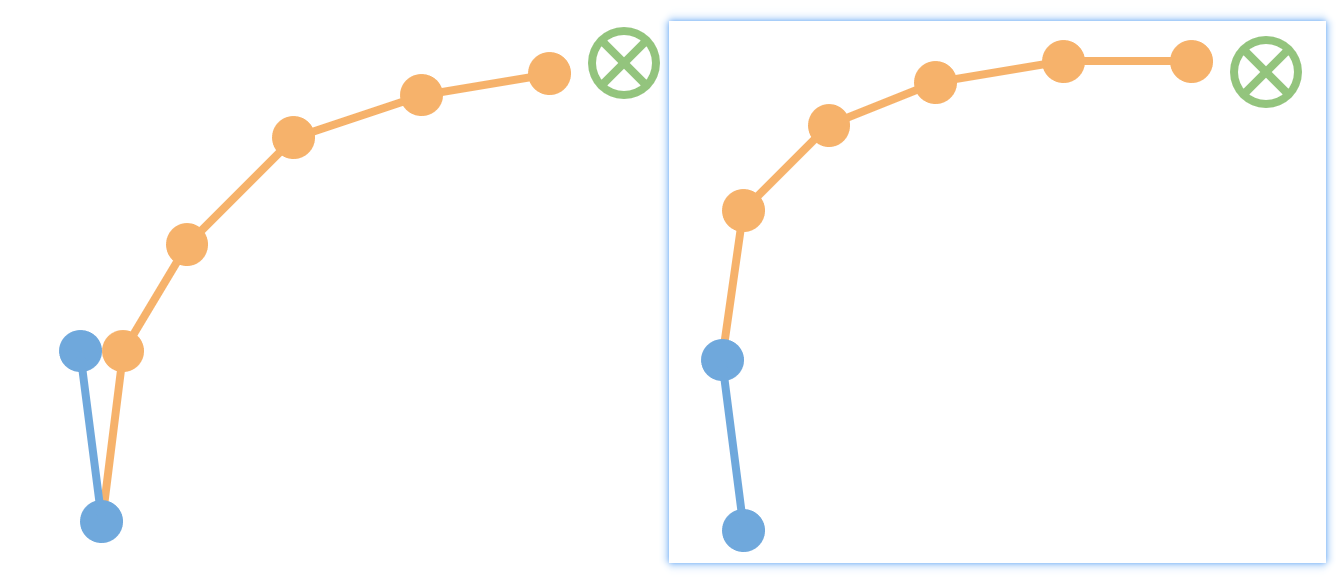
连续型场景下,主要是通过计算梯度的方法来更新action ,从而使得trajectory逐渐靠近最优解。
3.2.1 解决Sensitivity问题
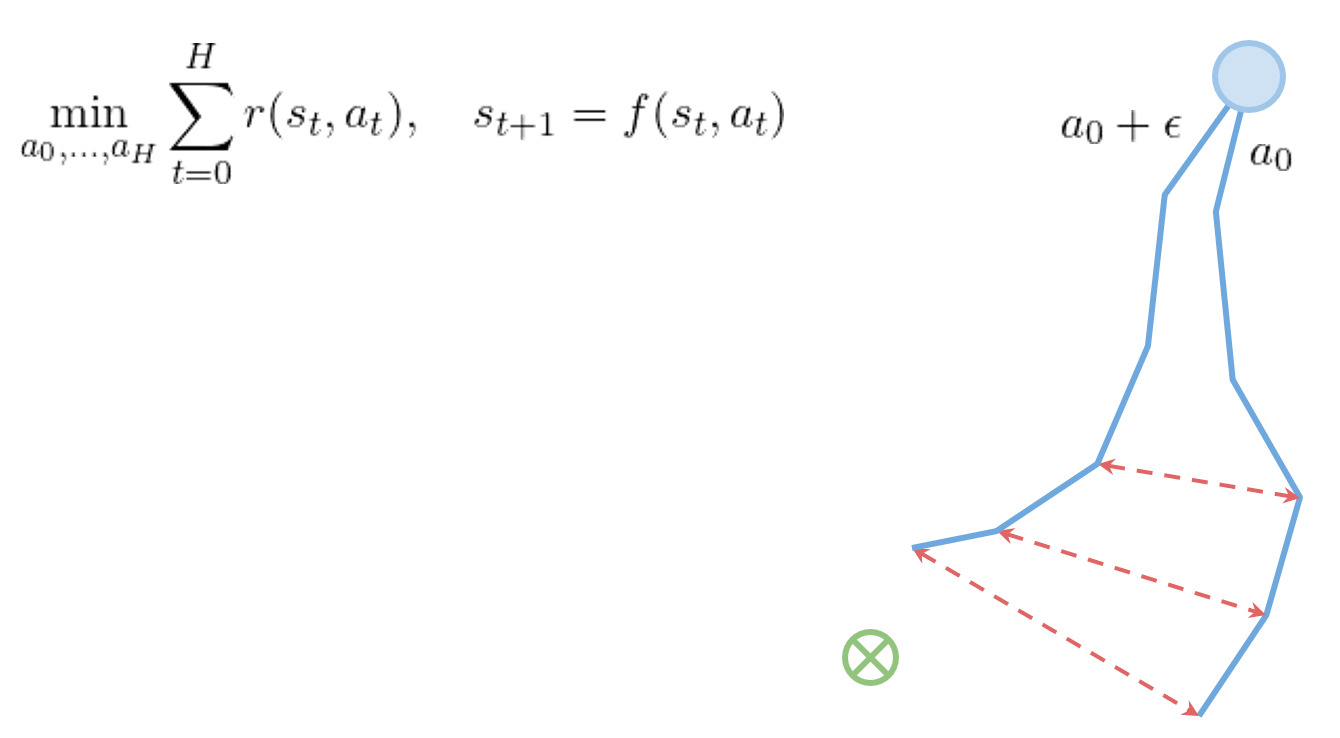
在shooting算法中,如下图所示,后续的状态对前面每一时刻的状态&动作都有依赖关系
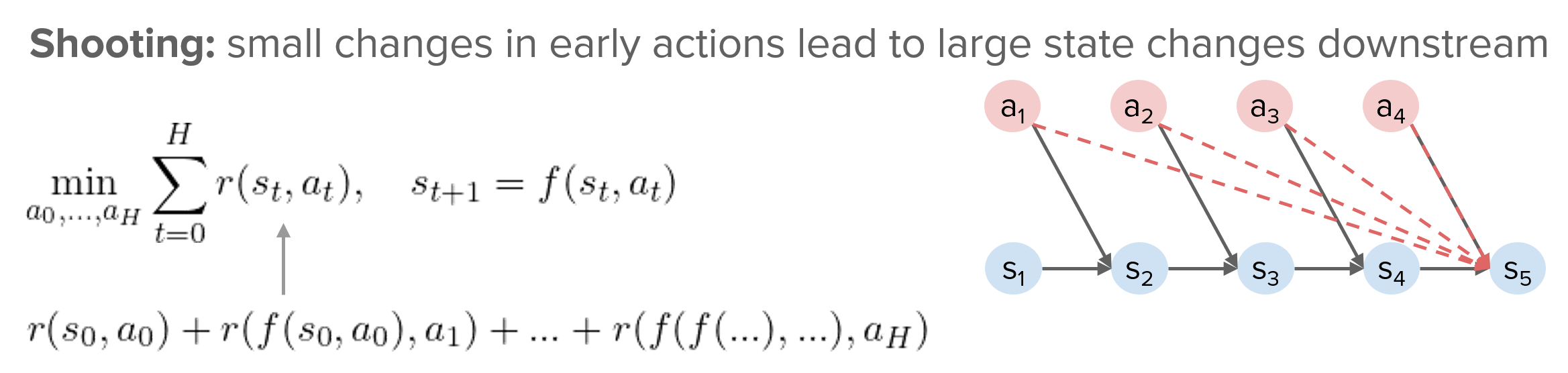
因此,如果执行初始action 时存在一个微小扰动(显然这也是很难避免的),那么planning时,你原本预期的rollout 和实际计算的rollout 很有可能在后期存在非常大的差异,导致你错误地估计了当前状态下执行action 的收益,从而错误地更新了策略。
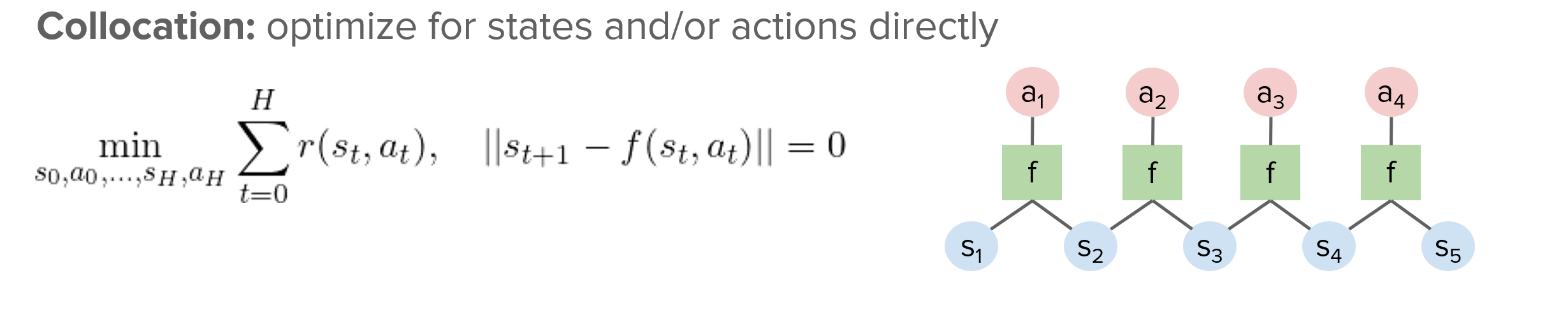
在collocation算法中,通过增加与的范数距离限制,确保后续状态不再受前面状态&动作影响,从而使得该问题得以改善
3.2.2 解决局部最优问题
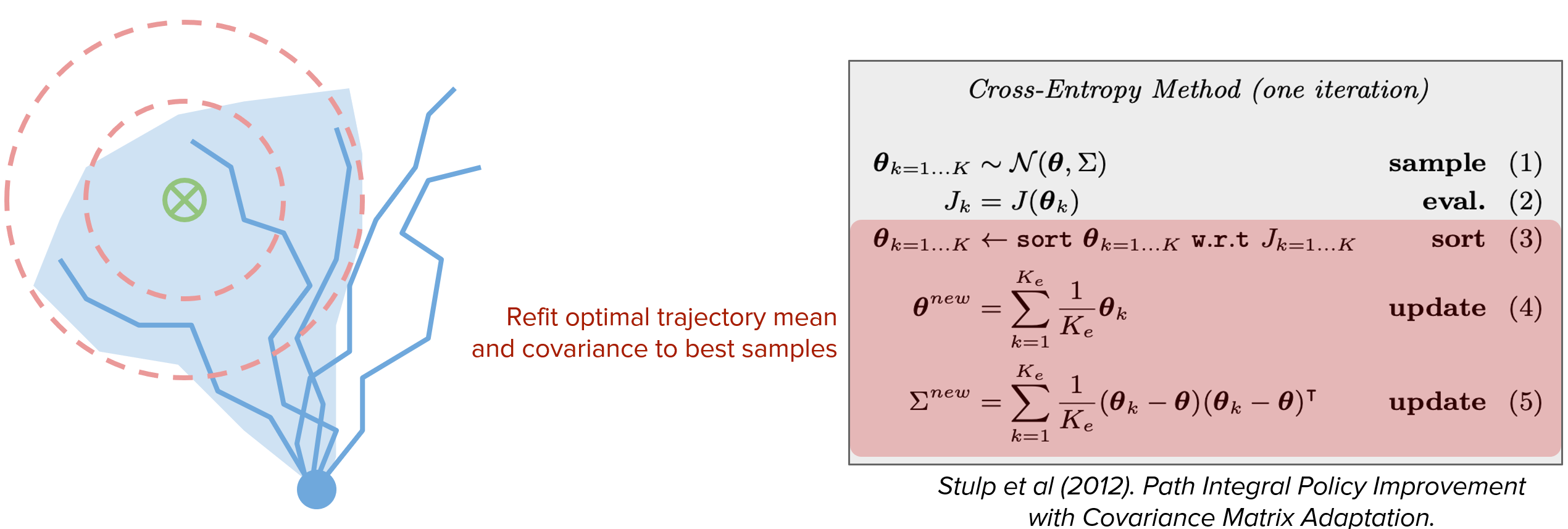
decision-time planning容易陷入局部最优,基于**交叉熵算法(CEM)**的理论保证,按照下图算法执行planning,可以更好地收敛到全局最优。
4 如果model不可靠?
Model-based方法虽然效率高,但由于存在model bias,小的误差会传播和累积,导致planning时exploit这些errors,使得后面越长的model rollout越可能不可靠。
为了尽可能规避model的不可靠性,下面的一些工作提出了不同的solution。
4.1 Re-Plan
Williams et al (2017). Information Theoretic MPC for Model-Based Reinforcement Learning.
这篇文章的方法中,在做完planning并且实际执行所挑选出来的action 后,真实情况与之前planning的rollout情况之间往往会存在误差,下一次plan时再遇到真实执行过动作的状态,会接着以前的真实state进行re-plan,而非又执行一步存在误差的model rollout。
4.2 合理控制rollout长度
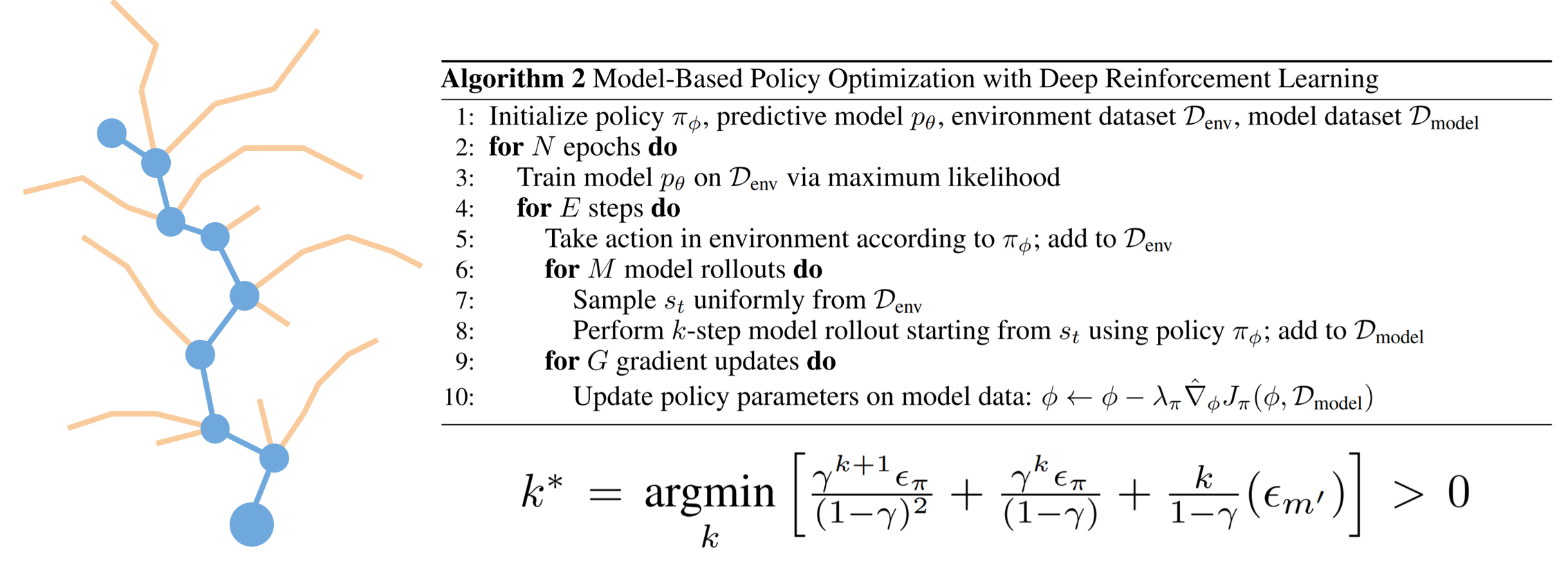
Janner et al (2019). When to Trust Your Model: Model-Based Policy Optimization.
在MBPO方法中,通过理论分析出了model-based方法的lower bound:
在该lower bound的控制下,确定出我们可容忍的最长rollout长度:
在plan时,只要把rollout控制在长度内,便能将误差控制在我们可接受的范围内。
4.3 Plan conservatively
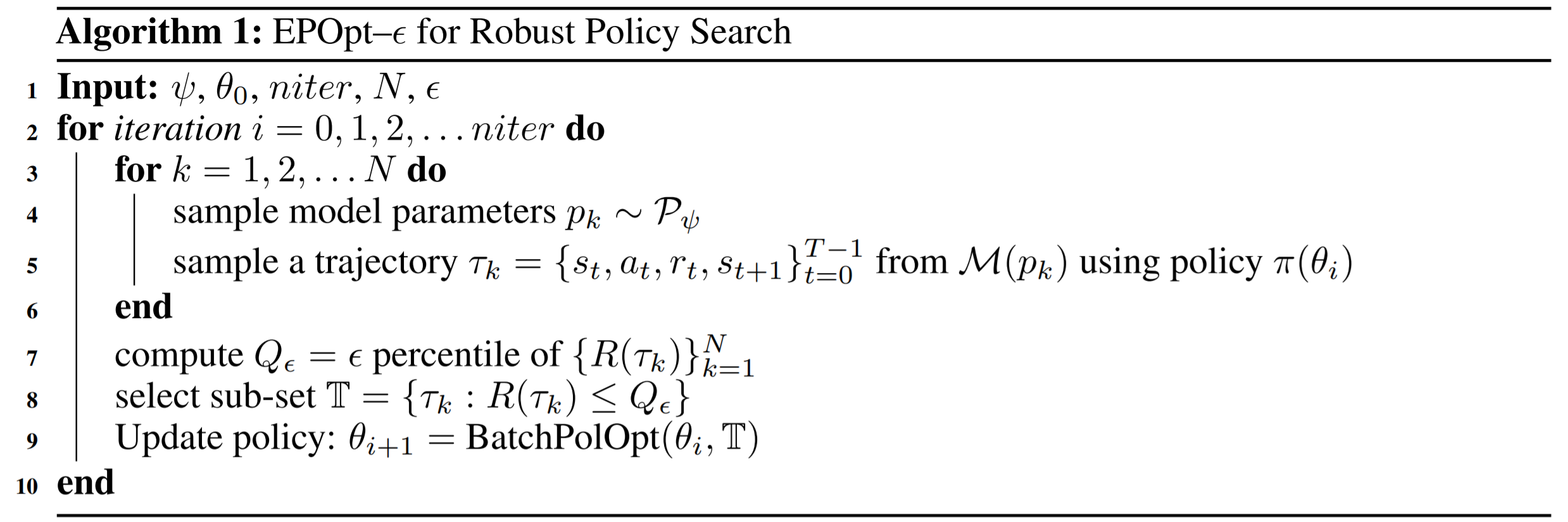
Rajeswaran et al (2017). EPOpt: Learning Robust Neural Network Policies Using Model Ensembles.
这篇文章通过谨慎地进行plan,每次仅保留return结果较差的trajectory,来学习一个更robust的policy,也能一定程度地规避的model bias。
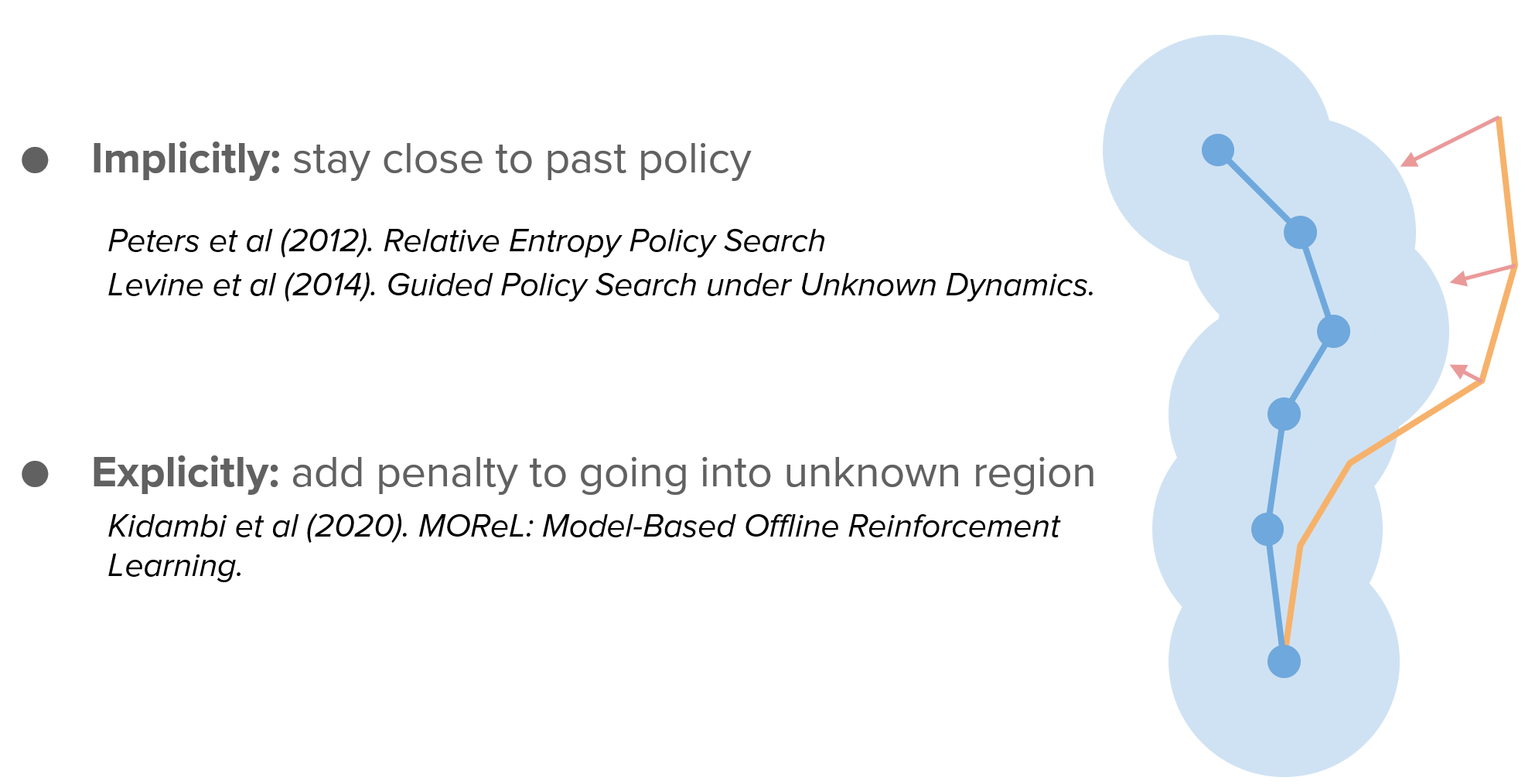
4.4 尽量只在model certain区域plan
还有一种方法,通过添加惩罚项(显式)或者一些熵函数(隐式)的方法,诱导planner尽量只在model certain区域做planning,也能规避掉因model uncertainty带来的error。
5. Reference
- Tutorial on Model-Based Methods in Reinforcement Learning. [Link]