Model-based 方法相较于Model-free 方法有着较好的 sample efficiency,但是由于对 Model 学习不足而引入的 bias 也会对后续的学习过程造成不可忽视的影响。
这里挑选介绍三篇以 model uncertainty 为主题解决该问题的文章。
Reference
- PILCO: A Model-Based and Data-Efficient Approach to Policy Search. [PDF][Code]
- Improving PILCO with Bayesian Neural Network Dynamics Models. [PDF][Code]
- Deep Reinforcement Learning in a Handful of Trials using Probabilistic Dynamics Models. [PDF][Code]
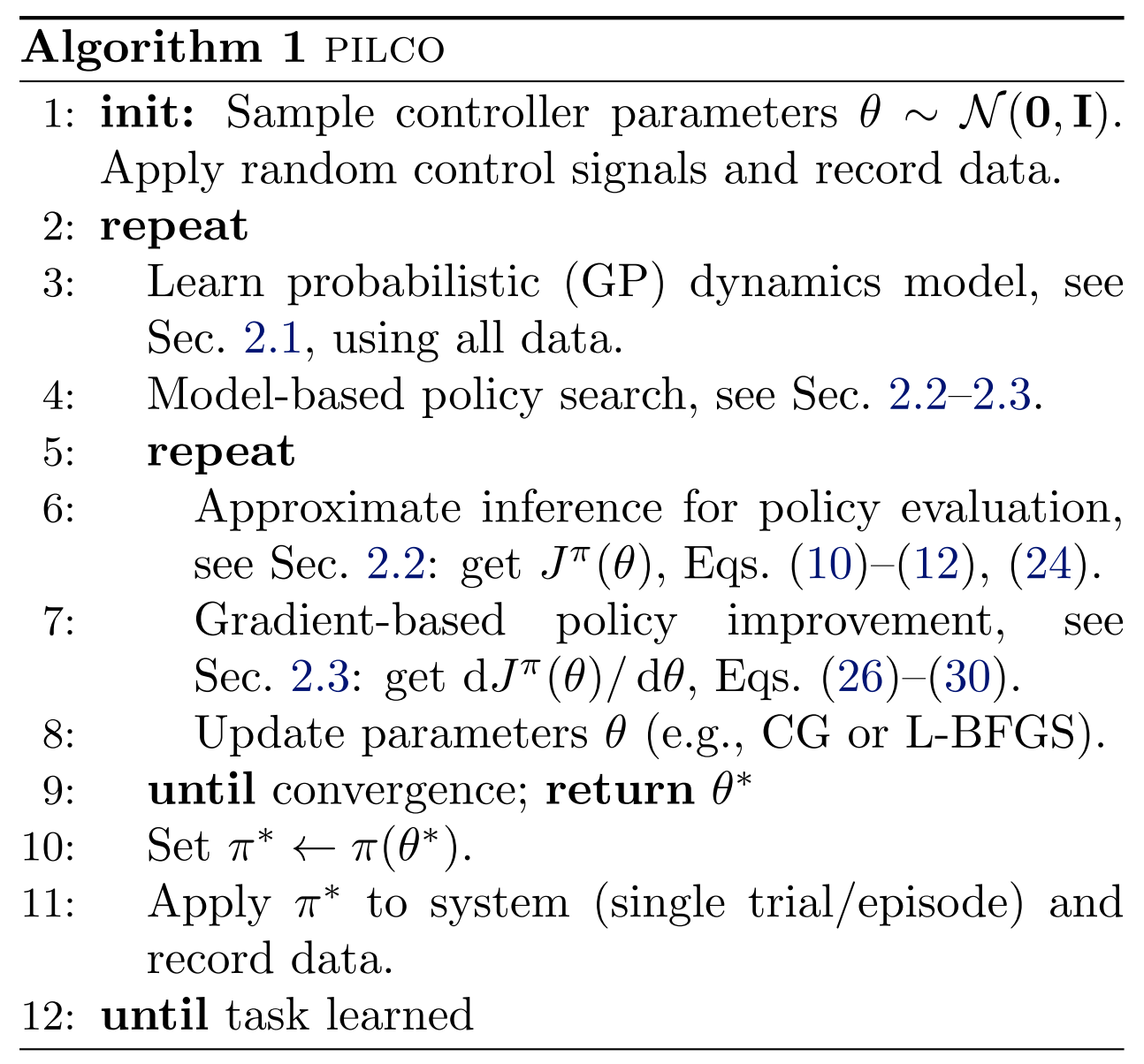
1. PILCO: A Model-Based and Data-Efficient Approach to Policy Search
1.1 Motivation
model-based方法有着较好的efficiency,但存在一定的局限性:model bias(对于小样本&无先验,这个问题更为严重),使用有bias的model去预测,进而会带来更大的误差。
1.2 Solution
学习一个probabilistic dynamics model,这样的model能够 express uncertainty,而不是直接丢弃 uncertainty。只要有了这种可表示 uncertainty,便能进一步用不同的方法来尝试削弱model bias的影响。
在PILCO中,使用了**高斯过程回归(gaussian process regression)**来学习这个probabilistic dynamics model。

基于所学到的model,不做rollout,而是直接计算
之后采用基于梯度()的Policy Search,找到最优参数,使得
此时得到
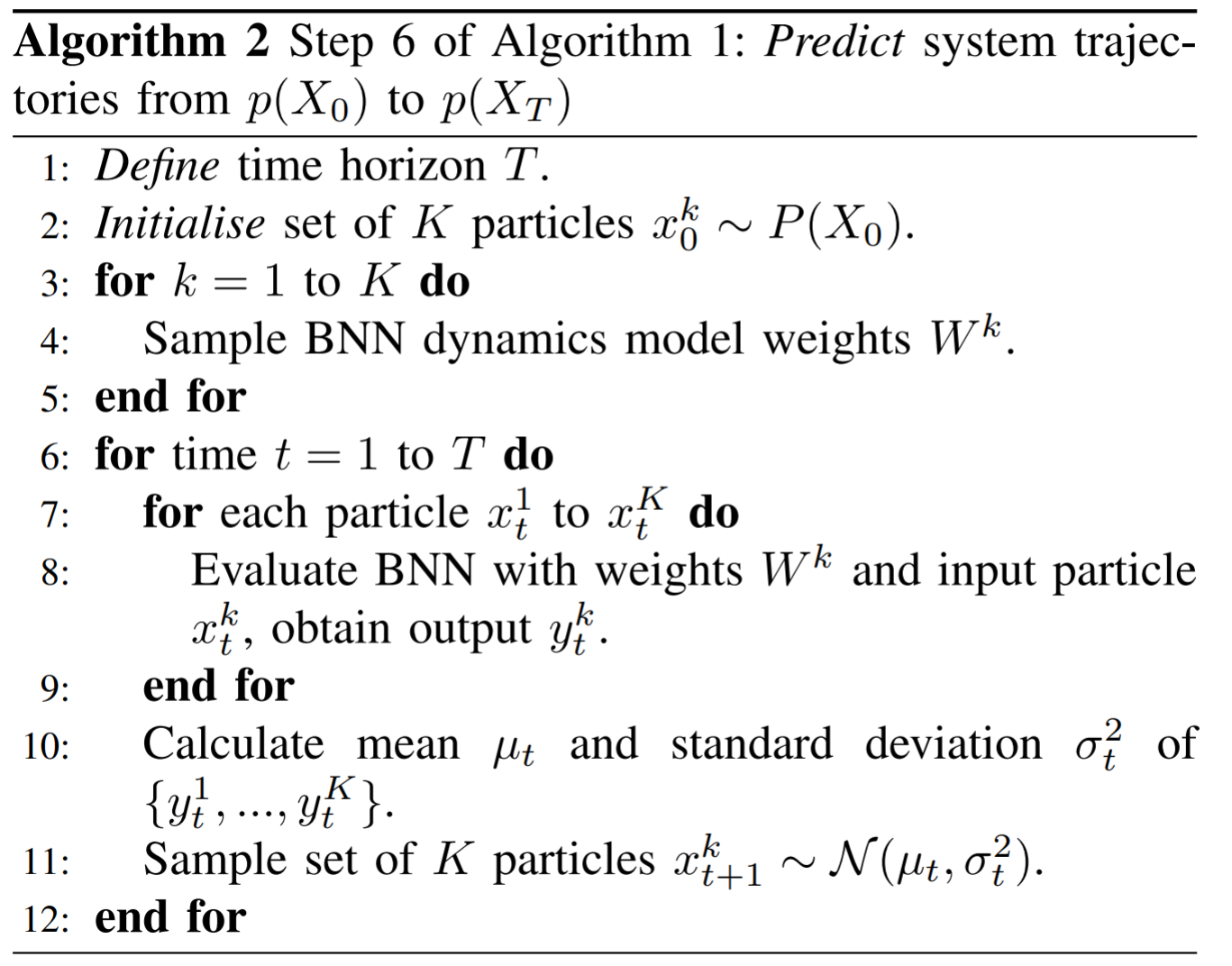
2. Improving PILCO with Bayesian neural network dynamics models
2.1 Motivation
GP regression不适合对复杂环境(e.g. 高维度)建模。
2.2 Solution
主要考虑是将regression替换为NN (Neural Network),但需要解决带来的两个问题:Output Uncertainty & Input Uncertainty
1) Output Uncertainty
将GP regression 替换为NN,能够进行更复杂的建模,但一般的NN不能express model uncertainty,考虑使用BNN (Bayesian Neural Network) 。
2) Input Uncertainty
PILCO因为使用了GP regression,因此可以analytically propagates state distributions through the dynamics model, i.e. 推导出分布 ,这些分布能够表示不确定的input 。
但若使用BNN,他的输入层只能接受确定性的input,无法表示所需要的不确定性,因此考虑使用particle methods:
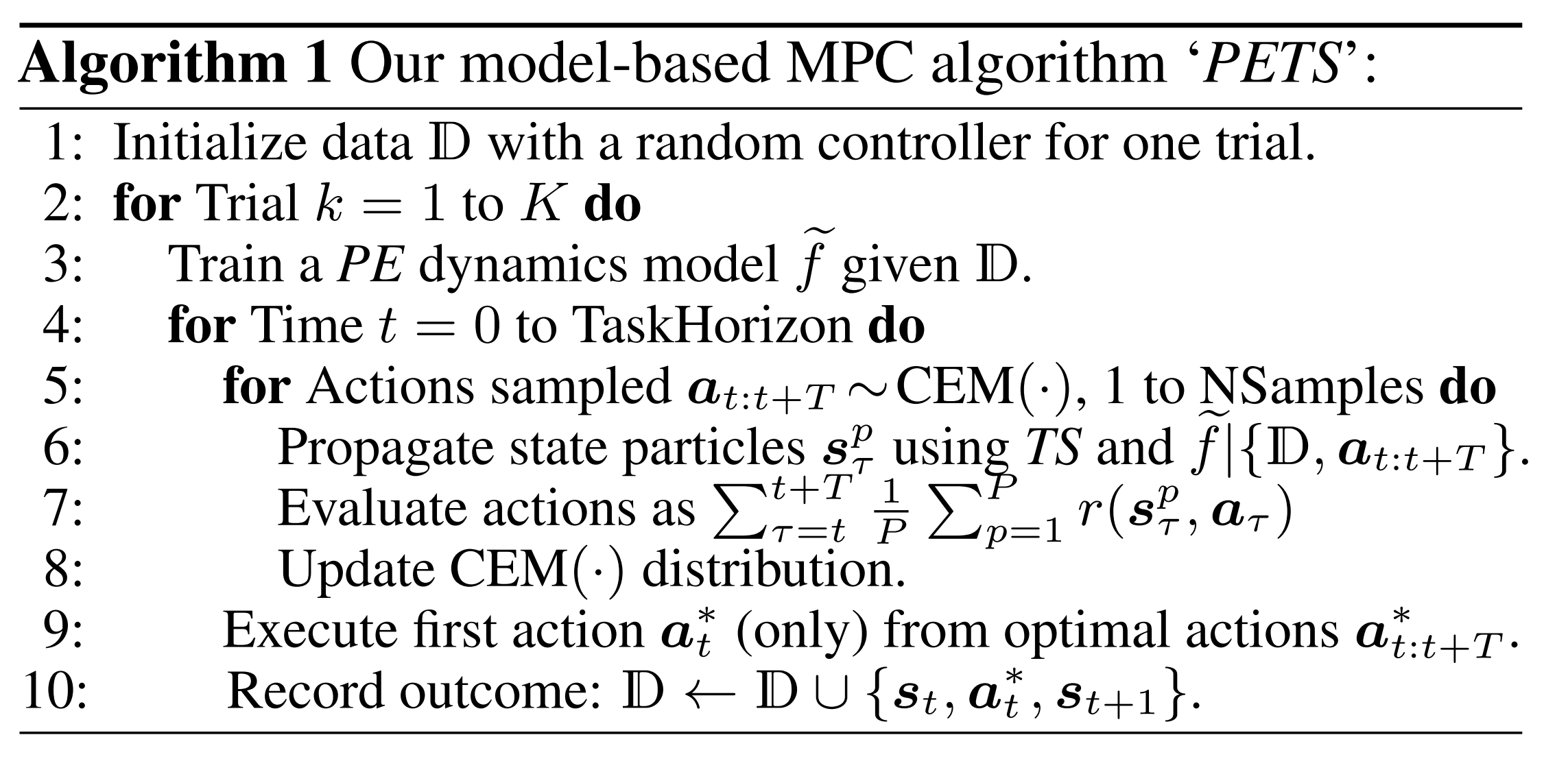
3. Deep Reinforcement Learning in a Handful of Trials using Probabilistic Dynamics Models
3.1 Motivation
和上一篇一样在解决PILCO的complexity问题
3.2 Solution
整体的核心思想和上一篇DeepPILCO一样:用更复杂的NN来代替GP regression,并解决所带来的 uncertainty 问题,不过这一篇的实验结果要优于上一篇。
3.2.1 PE (Probabilistic Ensemble)
1) aleatoric (inherent system stochasticity)
使用probabilistic NN来解决aleatoric uncertainty(上一篇的output uncertainty)
与Bayesian NN不同的是,这篇文章使用了 log prediction probability 来express uncertainty:
该NN的input是,output为,是一个parameterized distribution。
2) epistemic (subjective uncertainty, due to limited data)
使用Ensemble来解决epistemic uncertainty
核心思想就是对多个Probabilistic NN进行ensemble:consider ensembles of -many bootstrap models, using to refer to the parameters of our model , then get
3.2.2 TS (trajectory sampling)
create P particles from the current state, ,每个particle都服从分布进行传播:,其中particle的选择是基于一个bootstrap ,最终将P组Particles采集到的结果进行ensemble。